直升机通识
Posted by Mars . Modified at
直升机通识
直升机总体布局
- 共轴双旋翼;
- 主旋翼+反扭矩机构;
- 尾桨;
- 涵道尾桨;
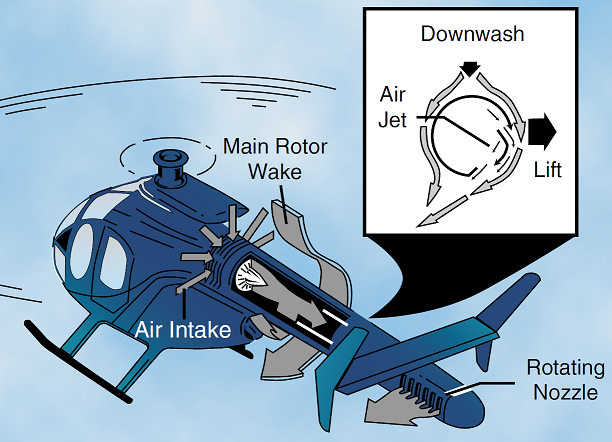
- 无尾桨:NOTAR(No Tail Rotor System 无尾桨传动系统);
直升机关键部件及其结构
发动机
主要是涡轴发动机和活塞发动机。
旋翼和桨毂
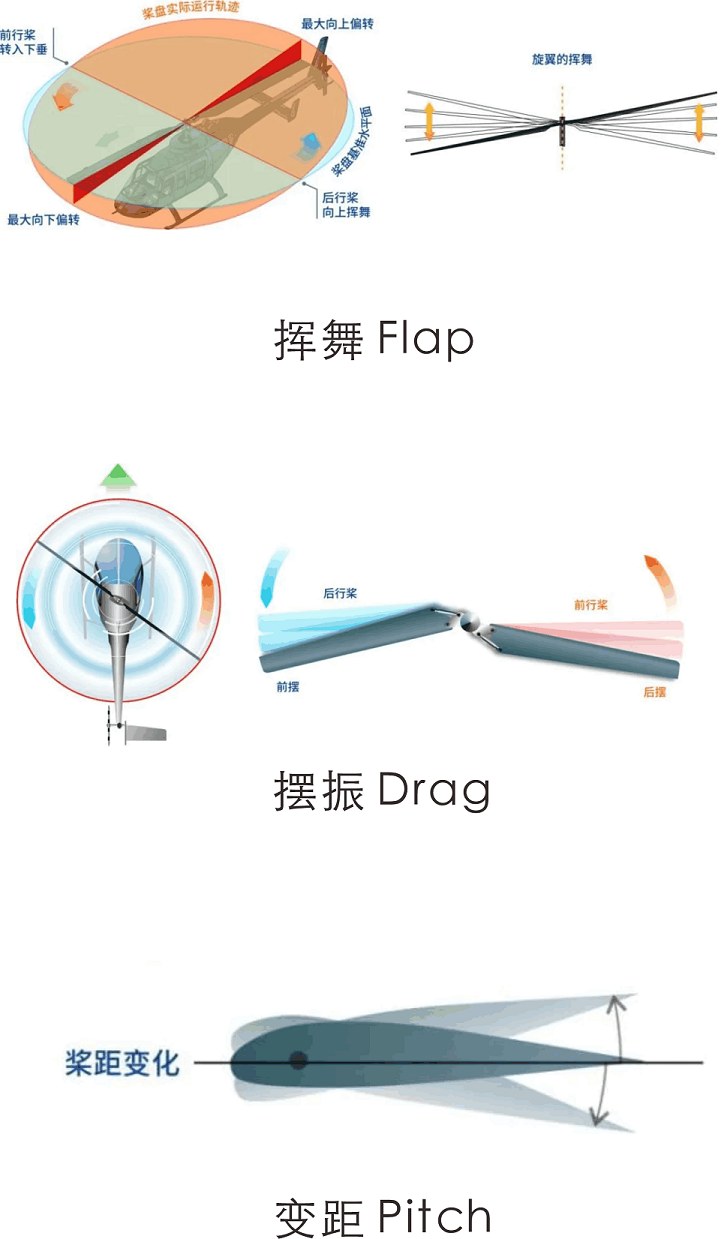
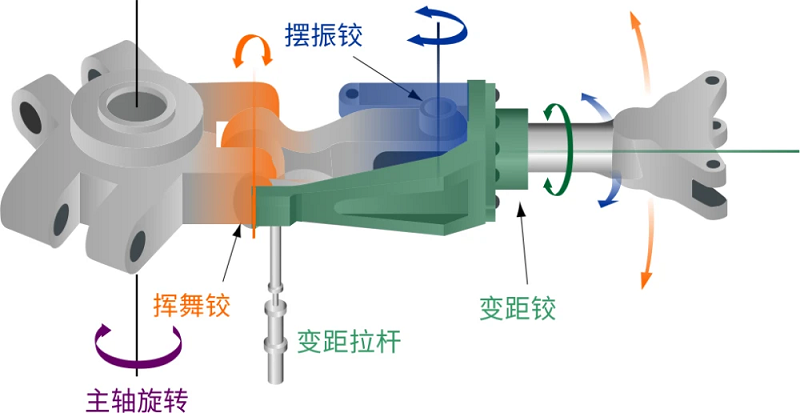
旋翼的三种运动模式:挥舞(Flap)、摆振(Drag)和变距(Pitch)。
在旧的直升机设计中,采用金属全铰接桨毂,旋翼三种运动模式对应着三种铰链机械结构:挥舞铰、摆振铰和变距铰。
旋翼操纵机构:旋转斜盘(Swash Plate)
三个铰链中,挥舞铰和摆振铰都是依靠桨叶承受受的空气动力、离心力、自身的弹性以及阻尼器的复位阻力自主工作的,不需人为干预。
只有变距铰需要人为操纵,用来改变直升机的升力大小。
旋转斜盘(Swash Plate)机构用来操纵变距铰,实现对旋翼的变距功能,改变旋翼的升力从而改变飞机飞行状态。

旋转斜盘分为动环和静环两部分。动环与静环之间用球形轴承连接,一同升降,一同倾斜。
动环(上斜盘)
动环通过变距拉杆和扭力臂与旋翼固联,会随着旋翼一起转动。
变距拉杆连接着旋翼的变距摇臂,通过变距拉杆的上下位移可以控制变距摇臂的角度,从而控制旋翼的总距(迎风角度)。
扭力臂用于传递动环与旋翼之间的扭力。
静环(下斜盘)
静环与飞机本体通过防扭臂和操纵连杆固联。通过操纵连杆,可以控制静环在主轴上的上下位置以及倾斜角度,从而带动控制上环的上下位置与倾斜角度,进而控制旋翼的总距。
旋转斜盘控制直升机的具体过程是什么?
1) 旋转斜盘整体上升或下降
旋转斜盘上升 -> 变距拉杆上升 -> 变距摇臂角度变大 -> 旋翼迎风角度变大 -> 旋翼总距整体变大 -> 桨盘总升力变大 -> 飞机垂直上升
2) 旋转斜盘左右倾斜
旋转斜盘静环向左倾斜(左低右高) -> 动环也向左倾斜(左低右高) -> 左侧变距拉杆下降,右侧变距拉杆升高 -> 左侧变距摇臂角度变小,右侧变距摇臂角度变大 -> 左侧旋翼迎风角度变小,右侧旋翼迎风角度变大 -> 左侧旋翼总距变小(升力小),右侧旋翼总距变大(升力大) -> 相对桨盘中心产生扭矩(逆时针)-> 机体发生倾斜(左低右高)-> 升力线向左倾斜,产生向左的分量 -> 直升机向左位移。
主减速器
主减速器(Main Gearbox),它的作用是减速、转向和并车。
减速
将发动机输出轴的高转速降低至旋翼适合的低转速,通过减速器的行星齿轮系来实现。
主要参数是减速比。
转向
发动机为了进、排气顺畅,一般是沿轴向安装的,而旋翼主轴是垂直安装,这个动力转向的过程也是在主减速器里通过纯齿轮机械结构实现。
并车
并车的概念适用于多发直升机。
通过将多个发动机输出的功率汇合到主减速箱,再由减速箱统一分配至旋翼、尾翼、发电机和液压泵等部件。
旋翼(螺旋桨)原理
螺旋桨理论基础
影响螺旋桨拉力的几个因素:转速、桨叶攻角和桨叶翼型形状。
桨叶上的攻角是桨叶弦线与来流方向的夹角。
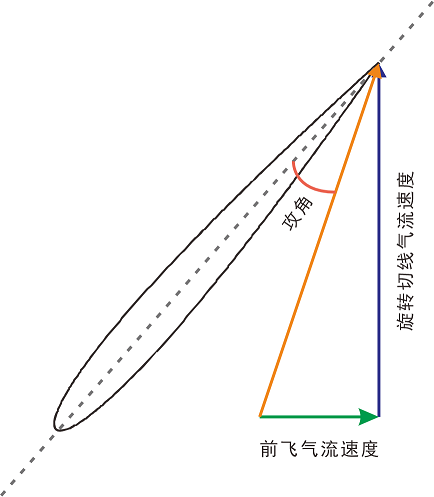
因为螺旋桨的旋转速度从叶根到叶尖是逐渐增大的,在同一个前进速度的情况下,如果为保证相同的攻角,则需要逐渐降低桨叶角(从叶根到叶尖)。
定距与变距
螺旋桨的桨距是否可变。定距螺旋桨整个是刚性一体的,其桨距是不可变的。
变距螺旋桨其桨距可调,典型的为恒速螺旋桨(可保持任意发动机功率下桨转速不变)。
螺旋桨尺寸
轻型、微型无人机常用定距螺旋桨,尺寸通常用X×Y来表示,其中:
X代表螺旋桨直径,单位为英寸(in);Y代表螺距,即假设螺旋桨在刚性物质中旋转一圈,桨平面所能经过的距离,单位为英寸(in)。例如,22×10的螺旋桨尺寸为桨径22in,约为55.88cm,螺距10in,约为25.4cm。
正桨与反桨
一般的螺旋桨正面光滑,同时刻有相应的螺旋桨参数值。
当该面朝前时,逆时针旋转产生拉力的为正桨,顺时针旋转产生拉力的为反桨。
桨叶数目
一般常见两叶桨和三叶桨。(主要是受限于二战时期的发动机功率水平和材料、工艺水平)
同转速下,桨叶数越多,则:
- 螺旋桨空气阻力越大,因而所需发动机功率越大;
- 桨叶提供的拉力越大。
螺旋桨性能
拉力与功率
拉力T近似是转速的二次函数,所需功率P是转速的三次函数。
螺旋桨的拉力与功率特性用静拉力系数与静功率系数表征。
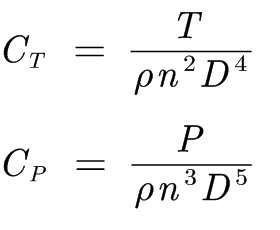
定距螺旋桨的静拉力系数和静功率系数,一般随螺旋桨转速变化不明显,可视为常数。
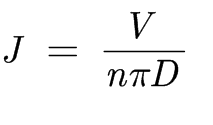
前进比
螺旋桨在飞机头部提供拉力时,飞机本身的飞行速度V会对螺旋桨各截面的迎角造成影响,从而影响螺旋桨的气动性能。
为评估这种影响,用来流速度V与螺旋桨桨尖速度n*π*D之比作为参考特征数,定义为螺旋桨的前进比。
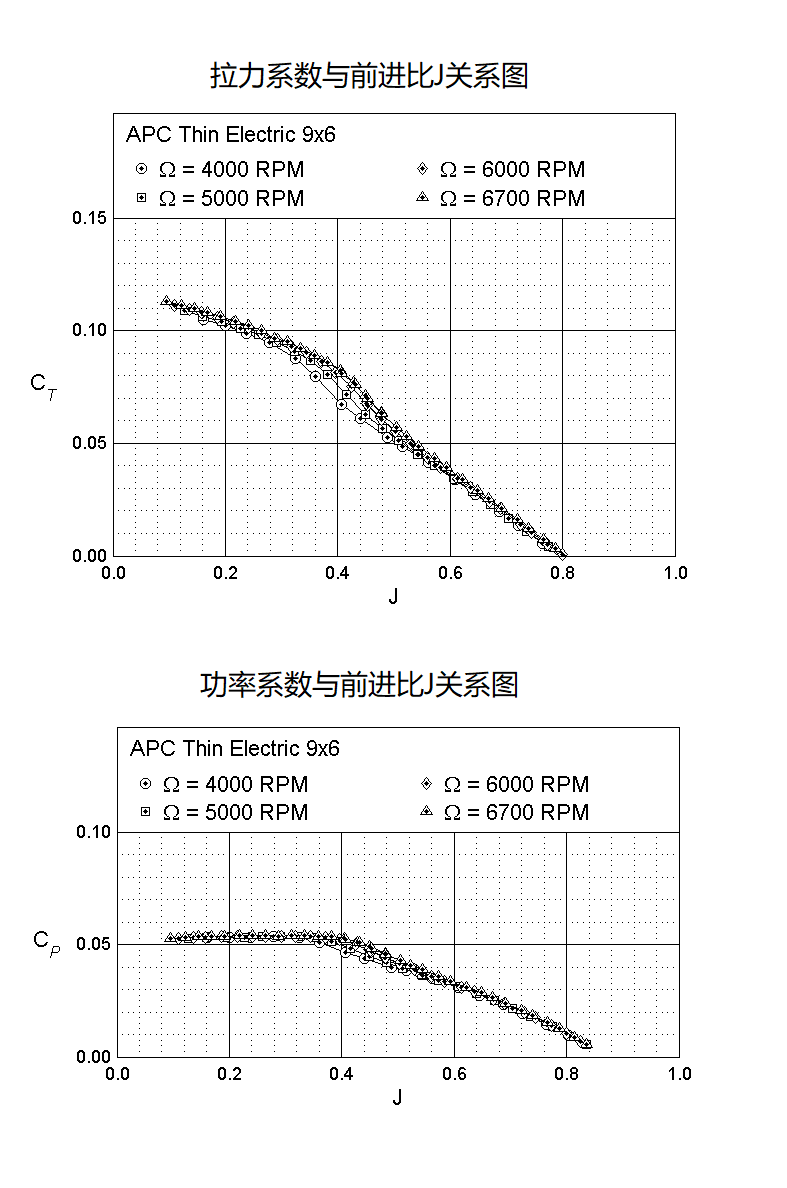
螺旋桨特性:拉力系数、功率系数随前进比的变化规律
- 拉力系数
C_T:随前进比J的增加,呈线性下降规律; - 功率系数
C_P:与前进比J呈二次函数关系。在低前进比的情况下,几乎是常数。
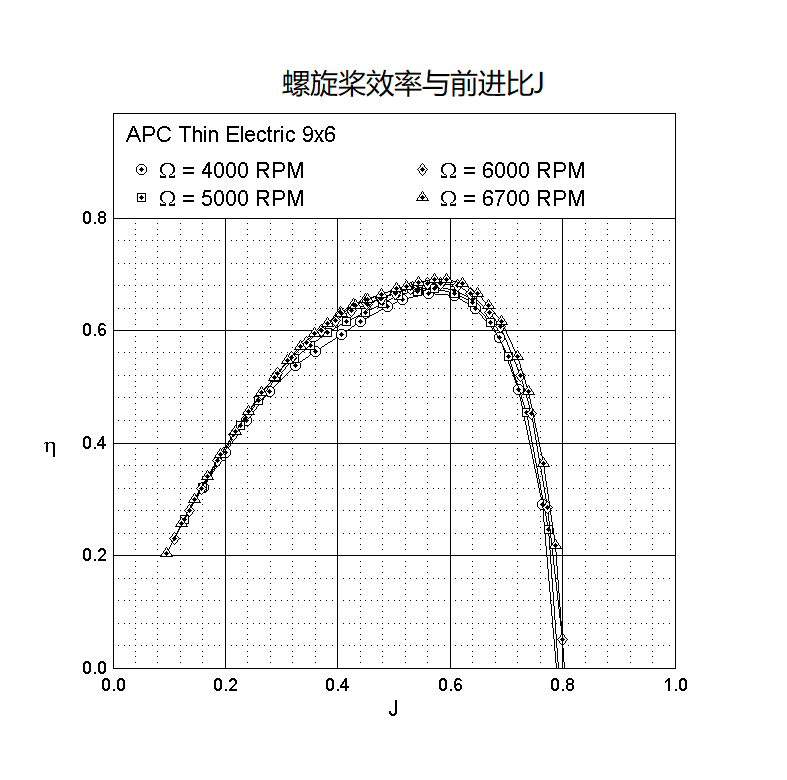
螺旋桨效率
螺旋桨将机械功率转化输出拉力功率的比值,为螺旋桨效率。
- 螺旋桨效率
η与前进比J为近似二次函数关系,具有最高效率点; - 定距螺旋桨,只有在一定的前进比
J的情况下,螺旋桨效率才能达到最高;
螺旋桨上的力
- 离心力:旋转产生的离心力大小将大于螺旋桨自身重力的7500倍;
- 拉力弯曲力;
- 扭矩弯曲力;
- 气动扭转力;
- 离心扭转力;
- 振动力;
FAQ
直升机为什么不通过调节发动机转速来控制飞行高度、速度?
直升机采取发动机定转速飞行,原因有三:
1、涡轴发动机和旋翼的工作转速范围都非常窄,而且旋翼高速旋转时产生巨大的转动惯量,要靠调节转速改变升力响应时间将会很长,无法精确操控;
2、结构复杂的主减速器已经承载了巨大的重力和旋转载荷,要再给它增加改变传动比的机构将导致主减速器过大过重,工程上不现实;
3、高速旋转的旋翼共振现象严重,全机各个部件在设计时都要避开其固定的几个共振频率,如果旋翼转速可变将导致共振频率跟着改变,令动力学设计复杂化。

